乮俆侽侽倠僶僀僩偱僠儑僢僩廳偄乯
仧垽抦導丂Y.M.Ojisan 偝傫偐傜偺夝摎丅
偙偙偱偺摿暿側婰朄偲偟偰丂俁梫慺儀僋僩儖
(f(a,b,c),f(b,c,a),f(c,a,b))傪[a,b,c仱f(a,b,c)]
偱昞傢偟
梫慺偺憤榓傪儼[a,b,c仱f(a,b,c)]偱昞傢偡偙偲偲偡傞丅
椺偊偽丂乮俙丄俛丄俠乯亖[兛,兝,兞仱(cos兛,sin兛)]偱偁傞丅
亂栤戣侾亃
梌幃傪彂偒捈偡偲
乮BC佦丄CA佦丄AB佦乯丗[兛,兝,兞仱(cos兞亅cos兝)x亄(sin兞亅sin兝)y]亖[倫,
倯, 倰仱倫]
偱偁傞丅捈岎慄偺俁幃傪嵍曈塃曈崌寁偡傟偽
丂儼[兛,兝,兞仱(cos兞亅cos兝)x亄(sin兞亅sin兝)y]
亖儼[兛,兝,兞仱(cos兛亅cos兛)x亄(sin兛亅sin兛)y]
亖侽倶亄侽倷
亖侽
丂傑偨丄丂儼[倫, 倯, 倰仱倫]亖倫亄倯亄倰
傛偭偰丄倫亄倯亄倰亖侽丂偱偁傞偙偲偑昁梫偱偁傞丅
亂栤戣俀亃
兛亄兝亄兞亖兌丂偲偡傞丅
丂[倫, 倯, 倰仱倫]
亖[兛,兝,兞仱sin(兛亄兞)亅sin(兛亄兝)]
亖[兛,兝,兞仱sin(兌亅兝)亅sin(兌亅兞)]
亖[兛,兝,兞仱sin(兌)乮cos兝亅cos兞乯亅cos (兌)乮sin兝亅sin兞乯]
傑偨
丂乮BC佦丄CA佦丄AB佦乯丗[倫, 倯, 倰仱倫]亖[兛,兝,兞仱(cos兞亅cos兝)x亄(sin兞亅sin兝)y]
偱偁傞偐傜
丂[兛,兝,兞仱(cos兞亅cos兝)(x亄sin(兌))亄(sin兞亅sin兝)(y亅 cos (兌))]亖乮侽丄侽丄侽乯
偮傑傝丂x=亅 sin(兌) y= cos (兌) 偱偁傝丄倶俀亄倷俀亖侾
偨偩偟丄學悢峴楍偺俼俙俶俲偑俀埲忋偺応崌偱偁傞丅
偮傑傝俙亗俛亗俠亗俙偱偁傞応崌丅
埲屻傕壖掕偡傞丅
擟堄偺t偵懳偟偰偼
丂[倫, 倯, 倰仱倫] 亖[兛,兝,兞仱sin(兛亄兞)亅sin(兛亄兝)]*sin(t)亄[兛,兝,兞仱cos(兛亄兞)亅cos(兛亄兝)乶*cos(t) 亖[兛,兝,兞仱sin(兌亅兝)亅sin(兌亅兞)]*sin(t)亄[兛,兝,兞仱cos(兌亅兝)亅cos(兌亅兞)]*cos(t) 亖[兛,兝,兞仱sin(兌)乮cos兝亅cos兞乯亅cos (兌)乮sin兝亅sin兞乯]*sin(t)亄[兛,兝,兞仱cos(兌)乮cos兝亅cos兞乯亄sin (兌) 乮sin兝亅sin兞乯]*cos(t) 亖[兛,兝,兞仱乮cos兝亅cos兞乯(sin(t)*sin(兌)亄cos(t)*cos(兌))]亄丂[兛,兝,兞仱乮sin兝亅sin兞乯(亅sin(t)*cos(兌)亄cos(t)*sin(兌))]傛偭偰
偮傑傝丄乮倶丄倷乯亖乮cos(兤)丄倱倝値(兤)乯偲抲偔偲偄偆偙偲偱偁傞丅
丂
摎偊偺曽傪曄宍偡傞偲丄
| 俙侾丗(cos( | 兝亄兞 2 | )*cos( | 兝亅兞 2 | )亅sin( | 兝亄兞 2 | )*sin(兤亅 | 兝亄兞 2 | ),sin( | 兝亄兞 2 | )*cos( | 兝亅兞 2 | )亄cos( | 兝亄兞 2 | )*sin(兤亅 | 兝亄兞 2 | ) |
| 俛俠佦偺曽岦丗曃妏 | 兝亄兞 2 | 偵cos( | 兝亅兞 2 | )丄 |
| 俛俠偺曽岦偵sin(兤亅 | 兝亄兞 2 | )偺揰偱偁傞偐傜丄 |
倢(x , y ,兤) 丗x*sin冇亅y*cos冇丂偵俙侾揰嵗昗傪戙擖偟寁嶼偡傟偽
丂2*l(A1,兤)= sin(冇亅兝)亄sin(冇亅兞)亅sin(冇亅乮兝亄兞亅兤乯)亄sin(冇亅兤)
偱偁傞丅
丂俀乮亅冇亄 乮兝亄兞亅兤乯乯亖亅兛亅兝亅兞亄兤亄俀兝亄俀兞亅俀兤=亅兛亄兝亄兞亅兤
丂俀乮冇亅兛乯亖兛亄兝亄兞亅兤亅俀兛亖亅兛亄兝亄兞亅兤
偱椉幰偼摍偟偄丅傛偭偰丄
l(A1,兤)=乮sin(冇亅兝)亄sin(冇亅兞)亄sin(冇亅兛)亄sin(冇亅兤)乯/2偱偁傞丅
B1,C1偺応崌傕椫姺懳徧偱偁傝摨條偱偁傞丅
亂栤戣俆亃
偙偺応崌丄曽岦偵摿堎惈偼柍偄偺偱兛丄兝丄兞丄兤i慡懱傪夞揮偝偣偰
兛亄兝亄兞亖侽偲偟偰傕堦斒惈傪幐傢側偄丅
| 側偍偦偺夞揮妏偼 | 兛亄兝亄兞 俁 | 偱偁傞丅 |
| 亖 | 乮cos兛亄cos兝亄cos兞乯sin冇i亅乮sin兛亄sin兝亄sin兞乯cos冇i亄sin乮俁冇i乯 2 |
堦斒惈傪幐傢偢兛亄兝亄兞亖侽偱峫偊傑偡丅
栤戣係傛傝丄僔儉僜儞慄偼壓婰偱偡丅
| sin冇i*乮倶亅 | cos兛亄cos兝亄cos兞 2 | 乯亅cos冇i*乮倷亅 | sin兛亄sin兝亄sin兞 2 | 乯亖 | sin乮俁冇i乯 2 |
| 乮 | cos兛亄cos兝亄cos兞 2 | 丆 | sin兛亄sin兝亄sin兞 2 | 乯 |
| 兤侾亅兛亖兤俀亅兝亖兤俁亅兞亖 | 乮俀値亄侾乯兾 俁 |
| 倂亖 | (俀n亄侾)兾
俁 |
| sin乮冇亄倓乯*倃亅cos乮冇亄倓乯*倄亖 | sin乮俁乮冇亄倓乯乯 2 |
| sin乮冇亅倓乯*倃亅cos乮冇亅倓乯*倄亖 | sin乮俁乮冇亅倓乯乯 2 |
| 倃亖 | cos(4*冇) 2 | 亄cos(亅2*冇)*cos(2d) |
| 倄亖 | sin(4*冇) 2 | 亄sin(亅2*冇)*cos(2d) |
| 2*冇12亖乮冇1亄冇2乯亖亅 | 兛亄兝 2 | 亅W |
| 2*倓12亖乮冇1亅冇2乯亖 | 兝乗兛 2 |
丂係俧亖乥Im乷 儼[兛丆兝丆兞仱(exp((兞亅俀倂)i)亄exp((W亄兛)i)亄exp((W亄兝)i))*(exp(亅(兛亅俀倂)i)亄exp(亅(W亄兝)i)亄exp(亅(W亄兞)i))] 乸乥
 傪梡偄傞偲
傪梡偄傞偲丂亖乥Im乷儼[兛丆兝丆兞仱(exp((兞亅俀倂)i)亅exp((W亄兞)i))*(exp(亅兛亄俀倂)i)亅exp(亅W亅兛)i] 乸乥 丂亖乥Im乷儼[兛丆兝丆兞仱(俀*exp((兞亅兛)i)亅exp((俁W亄兞亅兛)i))亅exp((亅俁W亄兞亅兛)i)] 乸乥 丂亖俀乥儼[兛丆兝丆兞仱sin(兞亅兛)]乥*乮侾亅們倧倱乮俁倂乯乯偱偁傞丅
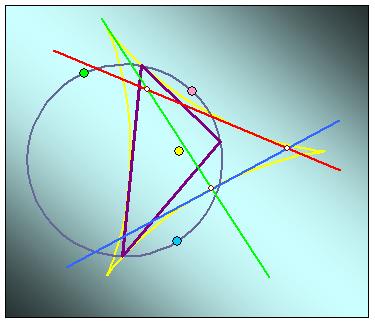
壓恾傪僋儕僢僋偡傞偲傾僯儊乕僔儑儞偑僗僞乕僩偟傑偡丅
乮俆侽侽倠僶僀僩偱僠儑僢僩廳偄乯
慡偰嶰妏娭悢悢幃張棟偱偲巚偭偨偺偱偡偑丄椡媦偽偢婔壗偲暋慺悢偵棳傟傑偟偨丅
僔儉僜儞慄偼側偐側偐偵桪旤側摦偒傪偡傞傕偺偱偡丅偟偽偟抆揗丅